Pasea perros automático
A downloadable project
OBJETIVO:
El objetivo del siguiente robot es conseguir que un perro pueda ser paseado por una persona con movilidad reducida.
Así que se necesita poder operar mediante un mando a distancia. Las características que tiene son:
- Tiene dos modos de funcionamiento: manual, guiado por el dueño a distancia, y automático, el robot se mueve automáticamente dentro de una zona de paseo sin salirse.
- Dispone de un sensor de perro parado para no arrastrar al perro cuando decide no andar, evitando así que se le pueda dañar.
- Dispone de un recogedor de excrementos para evitar ensuciar el entorno.
PASEA PERROS, MANDO A DISTANCIA:
El mando a distancia está formado por un ladrilloLego RCX que puede comunicarse por infrarrojos (como los mandos de la tele) con otros ladrillos RCX.
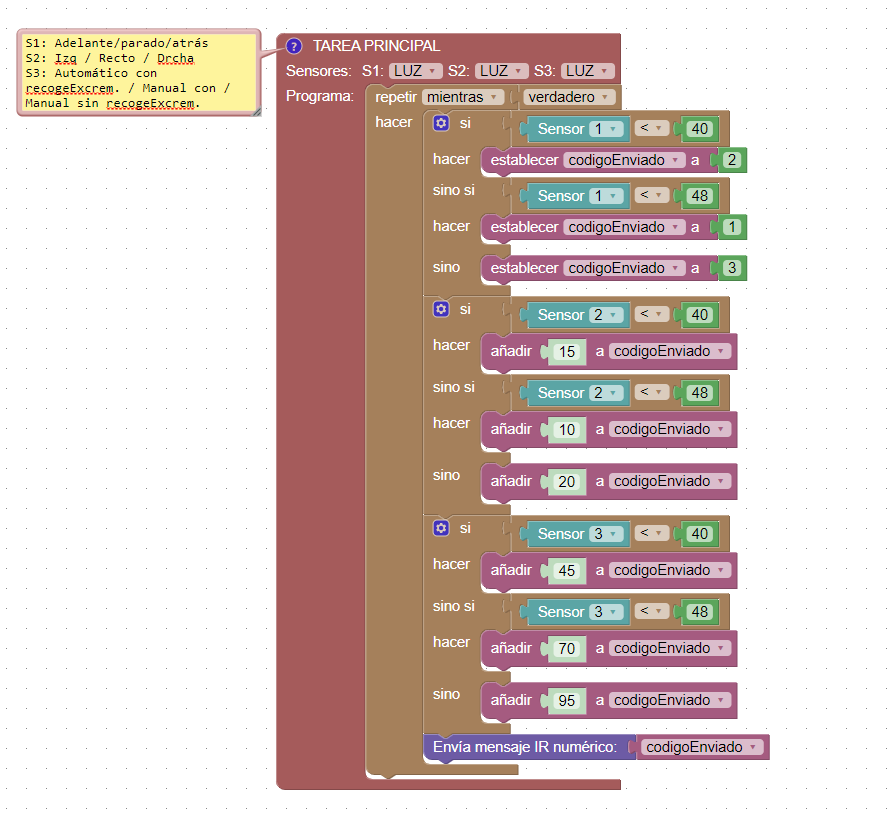
Los ladrillos RCX tienen 3 entradas para conectar sensores, y este mando tiene conectados 3 sensores infrarrojos de luminosidad. Se ha diseñado el mando con 3 joysticks que hacen girar una rueda pintada con 3 colores: negro, gris y blanco justo delante de cada uno de los sensores.
Así, moviendo los joysticks conseguimos detectar un valor de reflejo distinto, por lo que el ladrillo sabrá que hemos movido el joystick y entonces enviará un número al ladrillo RCX del robot pasea perros.
El número enviado se forma sumando un número del joystick 1, otro del joystick 2 y otro del joystick 3. El robot paseaperros ya descifrará el código recibido.
Un joystick controla 3 estados:
- Paseaperros modo manual con el recogeexcrementos parado.
- Paseaperros modo manual con el recogeexcrementos funcionando.
- Paseaperros modo automático con el recogeexcrementos funcionando.
Otro joystick controla en modo manual 3 posibilidades:
- Avanzar
- Retroceder
- Parar
El último joystick controla que, cuando el segundo joystick decida el avance o el retroceso, se produzca el movimiento:
- Girando a izquierda (tanto en avance como en retroceso)
- Girando a derecha (tanto en avance como en retroceso)
- Moviéndose recto.
PASEA PERROS ROBOT:
El robot tiene 3 sensores y 3 motores:
Un sensor que detecta si el perro se detiene para que el robot no lo arrastre y pueda herir al perro.
Este sensor tiene un sensor de contacto, una palanca y una goma elástica que empuja a la palanca apretando al sensor. Cuando el perro para, la palanca deja de presionar el sensor, avisando de que el perro hace fuerza para no moverse.
2 sensores de luminosidad apuntando al suelo por la parte delantera.
En modo automático detecta las líneas negras sobre fondo blanco de la zona de paseo. Cuando esto ocurre, el pasea perros deja de avanzar, maniobra para cambiar de dirección y continúa su paseo dentro del recinto.
Un motor actúa sobre el recogedor de excrementos, poniéndolo en marcha o parándolo. Como el ladrillo RCX no tiene más entradas para sensores, no podemos poner un sensor que detecte los excrementos y por lo tanto se conectará en modo manual cuando lo decida el usuario y, en modo automático estará siempre en marcha.
2 motores controlarán cada uno una de las 2 ruedas consiguiendo así todos los movimientos del pasea perros.


Comments
Log in with itch.io to leave a comment.
La idea es muy original y bien ejecutada!! Enhorabuena!!